

澳洲幸运5 一文带你了解双目深度相机

在如今的智能化期间,无论是工业车间里的机器东谈主、家里的扫地机器东谈主,如故AR眼镜、自动驾驶汽车,都需要一对能“看懂”三维宇宙的“眼睛”——双目深度相机即是这么一款修复。可能有东谈主会问,这东西到底是啥?其实说平常点,它就像给机器装了一对“东谈主眼”,通过两个录像头互助,就能算出物体的遐迩、大小,精准捕捉三维空间信息,这亦然它和普通单目相机履行的差异。从学术角度来说,双目深度相机是基于立体视觉旨趣,通过模拟东谈主类双眼视觉机制,哄骗三角测量法有计划场景三维深度信息的被迫式感知修复,应用于多个智能化领域,兼顾资本与性能上风,是目前中远距离三维感知的主流有运筹帷幄之一。
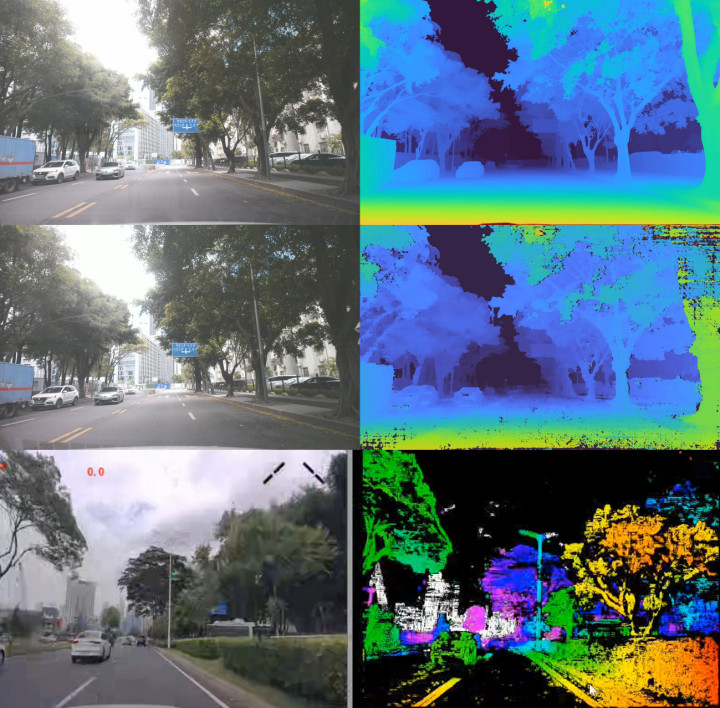
先给人人讲个好领略的,我们东谈主类为什么能判断物体的遐迩?其实即是因为傍边眼看到的覆没物体的位置会有少量点偏差,这个偏差就叫“视差”,离得越近,偏差越赫然,离得越远,偏差越小,无限远的时分偏差险些为零。双目深度相机即是哄骗这个简便的旨趣,只不外把东谈主眼换成了两个固定间距的录像头,行业里把这个固定间距叫作念“基线”,这然则相机精准测距的关键参数之一。我们平时用手机拍东西,只可拍出平面的相片,而双目深度相机的两个录像头会同步拍下覆没场景的两张图像,再通过算法找到两张图里对应的覆没个点,算出它们的视差,再代入三角测量公式,就能算出这个点到相机的深度,也即是距离,再把整个点的深度信息整合起来,就能形成一张完整的深度图,让机器明晰知谈咫尺的场景哪个所在高、哪个所在低,哪个物体近、哪个物体远,这即是它的主要使命逻辑,是不是很好领略?
双目深度相机的使命经过可分为四个报复关键,每个关键都平直影响感知精度与及时性。最初是图像预责罚,通过降噪、增强等算法优化图像质料,减少光照变化、传感器噪声对后续有计划的搅扰,这是保证深度有计划准确性的基础;其次是立体改换,基于极线几何旨趣,通过几何变换使傍边两幅图像的对极线水平对王人,将二维匹配简化为一维搜索,大幅裁汰有计划复杂度,这亦然进步算法遵守的关键技艺;然后是视差匹配,这是整个这个词经过的中心,通过局部匹配算法(如SAD、SSD)、全局匹配算法(如SGM)或深度学习匹配算法,找到傍边图像中的同名点,有计划出视差数值,不同算法的精度与遵守各有侧重,工业级产品多聘任全局匹配算法均衡二者需求;后头是深度图后责罚,通过中值滤波、孔洞填充等操作,去除原始深度图中的噪声与缺乏,保捏物体角落信息,进步深度数据的完整性与准确性。
说完旨趣,再说说它的硬件结构,其实也不复杂,我们普通东谈主也能看懂。一套完整的双目深度相机系统,主要由硬件组件和软件算法两部分构成,两者协同使命,统筹兼顾。硬件方面,比较报复的即是两个同步使命的单目相机,一般都会聘任全局快门CMOS传感器,这么能有用排斥领略暗昧,确保傍边两张图像的同步性,不会出现“一张拍早、一张拍晚”的情况,影响测距精度。镜头大多聘任M12接口,视场角比较大,能笼罩更巨大的感知范围,就像我们眼睛的视线一样,越宽能看到的东西越多。除了录像头,还有精密的机械结构,用来固定两个录像头的位置,保证基线长度在多样工况下都能保捏解析,否则稍稍一动,基线变了,测距就不准了,工业级的双目相机还会用铝合金或工程塑料作念外壳,抗振动、抗温度变化,幸免影响测量精度。另外,好的双目相机还会配备高性能SOC芯片,比如欧冶SD3589 SOC,具备苍劲的ISP图像责罚才能和NPU算力,能高效启动感知算法,完满深度图的及时输出,不必再依赖外部修复进行有计划,这亦然工业场景中常用的设立。
双目深度相机的硬件报复参数包括基线长度、焦距、视场角、测距范围、深度精度等,这些参数平直决定了相机的适用场景。基线长度越长,焦距越大,同样视差下的深度测量越精准,更适合远距离场景;而基线较短的相机,体积更小,更适合便携式修复。深度精度是指相机测量深度的过错范围,工业级双目相机的深度精度频频能达到毫米级,满足工件检测、机器东谈主疏浚等高精度需求;破钞级产品则侧重性价比,精度能满足日常交互需求即可。软件算法例是双目深度相机的“大脑”,除了前边提到的报复经过算法,还会包含相机标定算法、RGBD对王人算法等,其中相机标定是关键,需要精准得到相机的内参(焦距、主点坐标、畸变统共)和外参(两相机的相对姿态),唯有完成精准标定,才能确保深度有计划的准确性,这亦然双目相机出厂前必须完成的报复技艺。
接下来聊聊它的应用,这东西可不是实验室里的“冷门修复”,而是依然渗入到我们生存和工业坐褥的方方面面,平时我们可能没提防到,但它一直在寡言进展作用。先说说工业领域,这是双目深度相机应用比较深广的所在。在工业自动化车间里,它不错用来检测工件的三维尺寸,比如测量工件的长度、孔径、弧度,替代东谈主工检测,不仅遵守高,何况精度准,还能幸免东谈主工检测的过错,尤其适合多半量坐褥的场景。还有机器东谈主视觉疏浚,澳洲幸运5给工业机器东谈主装上双目深度相机,机器东谈主就能“看到”工件的位置和姿态,精准完成焊合、安装、搬运等功课,不必东谈主工示教编程,能适合多品种、小批量的坐褥需求,这亦然工业4.0升级的报复助力。另外,在物流仓储领域,双目深度相机还能测量包裹的体积,匡助物流企业优化仓储和输送遵守,幸免空间奢华,这亦然许多物流公司都在使用的技能,是不是很实用?
除了工业领域,我们生存中也能经常见到它的身影。家里的扫地机器东谈主,之是以能逃避产品、墙壁,不撞东西,还能识别清洁死角,靠的即是双目深度相机的深度感知才能,它能及时捕捉家里的环境信息,缱绻清洁旅途,幸免遗漏和碰撞。还有AR/VR修复,戴上AR眼镜能看到编造物体和真正场景无缝交融,比如在现实场景中投射编造的产品、摆件,这即是双目深度相机在进展作用,它能准确捕捉现实场景的深度信息,让编造物体“贴合”在现实场景中,进步千里浸式体验。另外,手机里的东谈主脸识别功能,许多也用到了双目深度相机,它能捕捉东谈主脸的三维信息,幸免相片、视频伪造攻击,进步东谈主脸识别的安全性,比如手机解锁、支付考证,都离不开它的支捏。在户外巡检场景中,双目深度相机还能适合强光环境,完满修复故障检测和距离测量,比其他深度感知修复更具上风。
不外话说转头,双目深度相机也不是无缺的,它有我方的上风,也有一些局限性,我们客不雅来说说。先说说上风,比较赫然的即是资本可控,它的硬件结构相对简便,不需要复杂的辐射和摄取模组,和同精度的ToF相机比拟,资本能裁汰30%~50%,更适合范围化部署,无论是工业批量应用,如故破钞级产品,都能承受。其次,它是被迫式使命方式,不需要主动辐射红外光等光源,只依靠环境光就能使命,既不会对周围环境形成搅扰,也能幸免主动光源被掩饰、反射带来的测量过错,尤其适合户外强光场景,这是它比结构光相机、ToF相机更有上风的所在。另外,它对物体材质的适合性强,不受名义神采、反射率的影响,只消场景具备一定纹理,就能完满精准的深度有计划,适用场景更深广。还有,它的中远距离测量性能出色,跟着距离增多,精度下跌相对精炼,适合中远距离三维感知场景,比如户外巡检、AGV导航等。
双目深度相机的局限性主要迷惑在四个方面。其一,对场景纹理依赖较高,在无纹理、弱纹理场景(如纯白墙面、光滑玻璃)中,难以找到有用的同名点,会导致深度缺失或精度下跌,这是由其视差匹配的旨趣决定的;其二,易受光照条目影响,极亮或极暗环境会裁汰图像质料,进而影响视差匹配成果,导致深度有计划过错增大;其三,有计划复杂度高,及时高质料的视差匹配需要较强的算力支撑,对芯片性能要求较高,若算力不及,会影响深度图的输出速率,难以满足及时感知需求;其四,存在掩饰问题,场景中被掩饰的区域只可被单颗相机捕捉,无法有计划深度,会产生深度缺乏,这亦然目前双目视觉技能需要突破的难点。
跟着技能的不停迭代,这些局限性也在缓缓被克服。比如通过交融深度学习算法,进步弱纹理场景的匹配精度,减少深度缺乏;搭载高性能NPU单位,进步有计划遵守,满足及时感知需求;结合多传感器交融技能,与激光雷达、IMU等传感器协同使命,构建更可靠的三维感知系统,拓展应用范畴。目前,国产双目深度相机的发展也越来越快,国产化元器件的使用率不停进步,国产厂商凭借资本上风和原土化做事上风,缓缓扩大市集份额,在工业、破钞电子等场景完满范围化应用,残害了外资厂商的把持,这亦然我们国产技能的高出。
总的来说,双目深度相机是一款“接地气”又“高**”的三维感知修复,既有着简便易懂的使命旨趣,又有着严谨的学术支撑澳洲幸运5,既能满足工业坐褥的高精度需求,又能融入我们的日常生存,给我们的生存和使命带来便利。它模拟东谈主类双眼的视觉机制,以较低的资本完满了非战斗式深度感知,解锁了更多三维感知的应用可能,是鼓动智能化升级的报复支撑。异日,跟着硬件集成化进程的进步和算法技能的优化,双目深度相机的体积会更小、功耗更低、精度更高,应用场景也会进一步拓展,从工业自动化到破钞电子,从机器东谈主导航到三维重建,它会在更多领域进展报复作用,让机器更精准地“看懂”三维宇宙,助力百行万企完满更高质料的发展。
澳洲幸运8官方网站 备案号:
备案号: